
Ce kit fera l’objet d’un atelier de 2 modules de 2h avec 8 jeunes collégiens ou lycéens dans chaque médiathèque de Cesson et Vert St Denis.

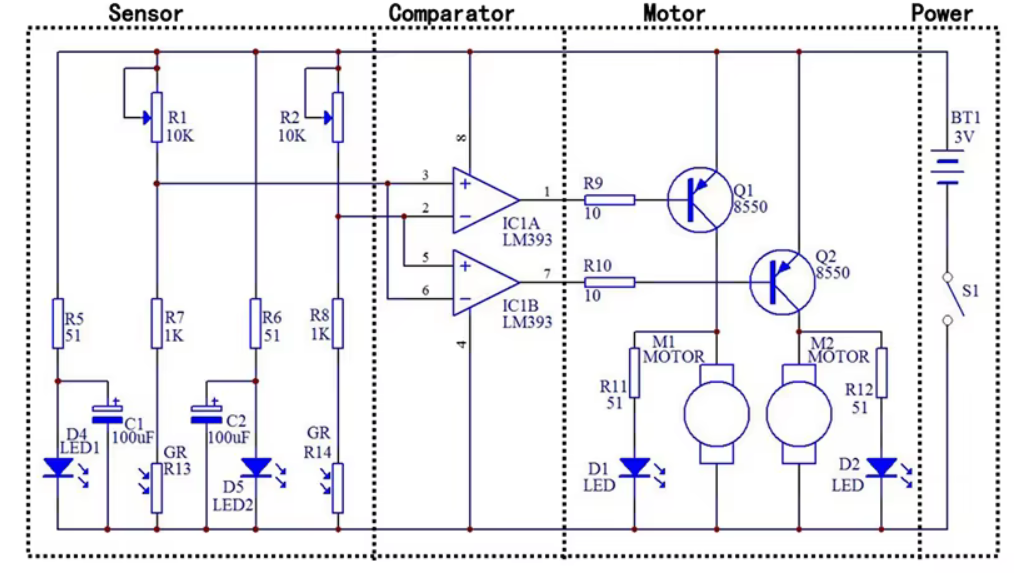
Bloc “Sensor” – Détection de la ligne #
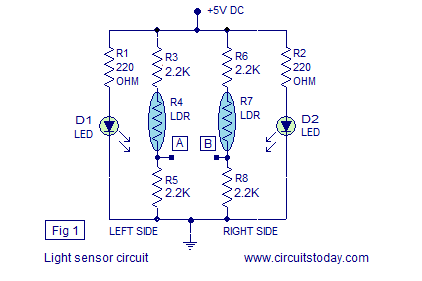
Ce bloc comporte deux capteurs optiques identiques, chacun constitué de :
🔹 Une LED d’éclairage (D4 et D5) #
- Ce sont des LED blanches qui éclairent la piste.
- Elles sont en série avec une résistance de limitation (R5 et R6).
- Elles illuminent le sol juste devant le robot.
🔹 Une photorésistance LDR (GR13 et GR14) #
- Elles détectent la luminosité réfléchie par le sol.
- Un sol clair → réfléchit davantage → tension plus haute
- Un sol noir (ligne) → absorbe → tension plus basse
🔹 Pont diviseur R1/R7 et R2/R8 #
Chaque capteur est un pont diviseur :
- R7 ou R8 = résistance fixe 1 kΩ
- LDR = résistance variable selon la lumière
- R1 et R2 (10 kΩ) stabilisent le point haut
La sortie du pont est la tension envoyée au comparateur LM393.
👉 Donc :
- Ligne noire = LDR forte résistance = tension haute ou basse selon montage
- Fond blanc = LDR faible résistance = tension inverse
Ces deux tensions vont dans le comparateur.
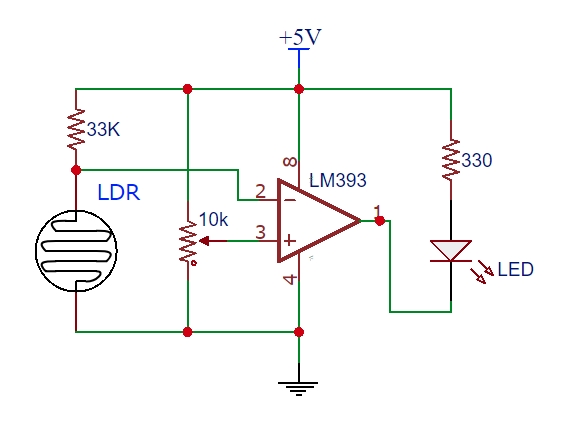
Bloc “Comparator” – LM393 #
Le LM393 contient 2 comparateurs indépendants : #
- IC1A compare capteur gauche vs une référence
- IC1B compare capteur droit vs une référence
Fonction : #
Le comparateur génère un signal numérique :
- Sortie basse = LED/LDR voit du blanc
- Sortie haute = LED/LDR voit du noir
Le robot peut alors décider : #
- Si gauche voit noir → tourner à droite
- Si droite voit noir → tourner à gauche
- Si les deux voient blanc → aller droit
Résistances R9 et R10 #
Ce sont des résistances limitant le courant pour attaquer les transistors Q1 et Q2.
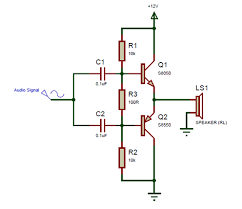
Bloc “Motor” – Pilotage des moteurs #
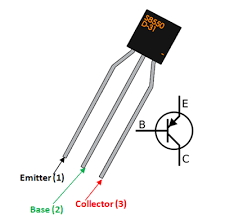
Les transistors Q1 et Q2 (8550 = PNP) #
Le LM393 ne peut pas fournir assez de courant pour entraîner un moteur.
→ On utilise donc des transistors PNP comme interrupteurs de puissance.
Fonctionnement : #
- Si sortie du LM393 passe à la masse → transistor PNP sature → moteur tourne
- Si sortie du LM393 reste haute (au +3V) → transistor bloqué → moteur éteint
Chaque moteur a sa résistance de limitation (R11, R12) et sa LED témoin (D1, D2).
Les LED D1 et D2 #
- Elles montrent quand les moteurs tournent
- Elles sont en parallèle avec les moteurs
Bloc “Power” – Alimentation #
Alimentation par pile 3 V
S1 = interrupteur général
Tout le circuit est alimenté en commun par cette source unique
Résumé du fonctionnement complet #
- Les LED D4 et D5 éclairent le sol.
- Les LDR captent la lumière réfléchie :
- Blanc = lumière forte
- Noir = lumière faible
- Le LM393 compare les signaux :
- Capteur gauche → moteur droit
- Capteur droit → moteur gauche
- Les transistors activent ou coupent les moteurs.
- Les LED D1 et D2 indiquent l’état des moteurs.
🟢 Ce que fait la voiture suiveuse de ligne #
| Capteur gauche | Capteur droit | Action | Résultat |
|---|---|---|---|
| noir | blanc | moteur gauche ON | tourne à gauche |
| blanc | noir | moteur droit ON | tourne à droite |
| blanc | blanc | les 2 ON | avance droit |
| noir | noir | les 2 OFF (selon version) | arrêt |



